












Raffaello Dalla Mariga
总经理
Raffaello是RPS计量基石的代表,Raffaello自上世纪80年代就是关节臂测量仪的先驱。在30多年的职业生涯中成功创立并管理多家公司之后,如今成为RPS Metrology的常务董事。 他凭借丰富的经验,敏锐的商务直觉以及追求创新和品质的热情从事RPS的管理工作。 Raffaello同时也负责管理意大利客户和分销商的工作。









Latest products

宣传视频
ABOUT US

睿谱斯(北京)科技有限公司的创立源自于我们的意大利创立者30多年来对精密关节臂测量设备研制持之以恒的热情,丰富的技术经验和坚持不懈的努力。
1983年意大利RPS品牌的三个股东之一的Raffaello Dalla Mariga创立了RPS最早的前身Garda Impiant,专门研制用于车身维修的机器设备。
1987年,Garda Impiant申请了第一个专利,并生产了真正的第一个移动测量臂,命名为CMS CAR3D。
1990年,Garda Impianti展示了全新的移动式的关节臂测量方式“空间和坐标测量”:这是第一个真正意义上的七轴关节臂测量仪。经过多年的发展。
1993年专注于关节臂测量仪的Garda成立。Garda致力于进一步开发可移动式测量产品,研制了便携式关节臂测量仪,涵盖模型测量等系列产品。
2015年,三位联合创始人Raffaello Dalla Mariga,Paolo Perbellini和Stefano Recchia基于多年共事的尊重信任和友谊,进一步加强在技术和商业领域的合作,以更强大的使命感迎接关节臂测量仪市场的挑战,创立RPS品牌,之后正式进入中国。

Raffaello是RPS计量基石的代表,Raffaello自上世纪80年代就是关节臂测量仪的先驱。在30多年的职业生涯中成功创立并管理多家公司之后,如今成为RPS Metrology的常务董事。 他凭借丰富的经验,敏锐的商务直觉以及追求创新和品质的热情从事RPS的管理工作。 Raffaello同时也负责管理意大利客户和分销商的工作。

Paolo在19岁时开始了他的职业生涯,并于2015年正式进入关节臂测量仪领域。他具有超过25年的机械设计和专业产品管理丰富经验,进而转向从事市场开发和销售网络构建及管理工作。 Paolo凭借出色的工作能力建立与全球不同国家客户的合作,他可以流利使用五种不同语言与RPS全球客户开展技术及商务等方面的工作。

成功产品的背后,总有一支高技能的技术团队。Stefano是技术总监,负责产品和技术服务管理。 Stefano具有20多年的精密机械工程,电子和软件开发等领域的工作经验,这让他具备更高的眼界去专注于RPS 计量每款产品及其应用的技术开发。

Marco是人们对精度和生产技术充满热情的驱动力。在测量臂领域的丰富经验,在RPS计量方面,Marco代表了产品质量,服务和维护管理背后的一切。
NEWS CENTER

机械臂的种类有很多,类型分为工业用和教育类使用,工业机械臂的价格昂贵,通常最便宜的好几万,而且研究更复杂,体型更庞大,一般玩家驾驭不来。
了解更多 >
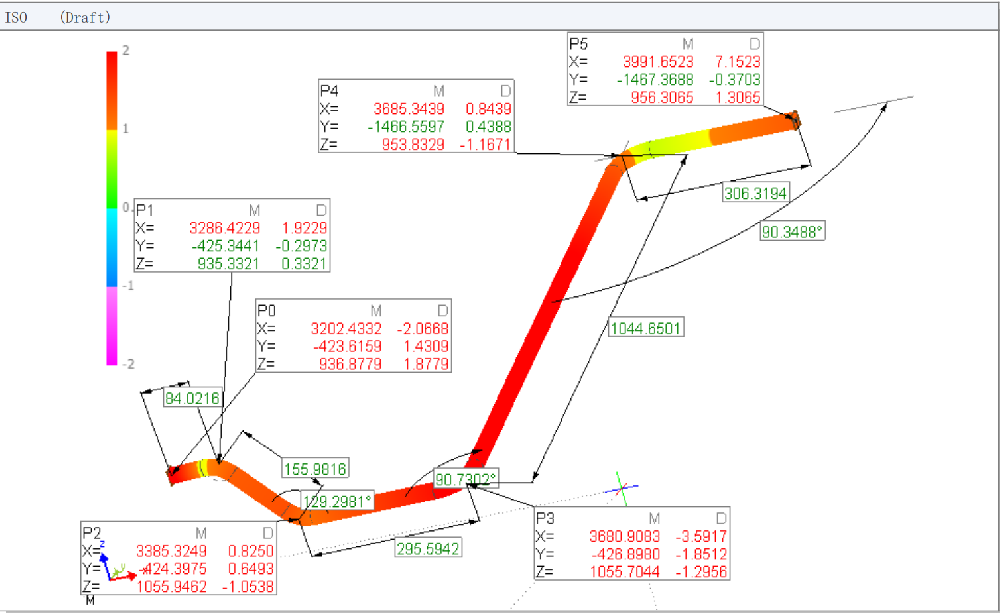
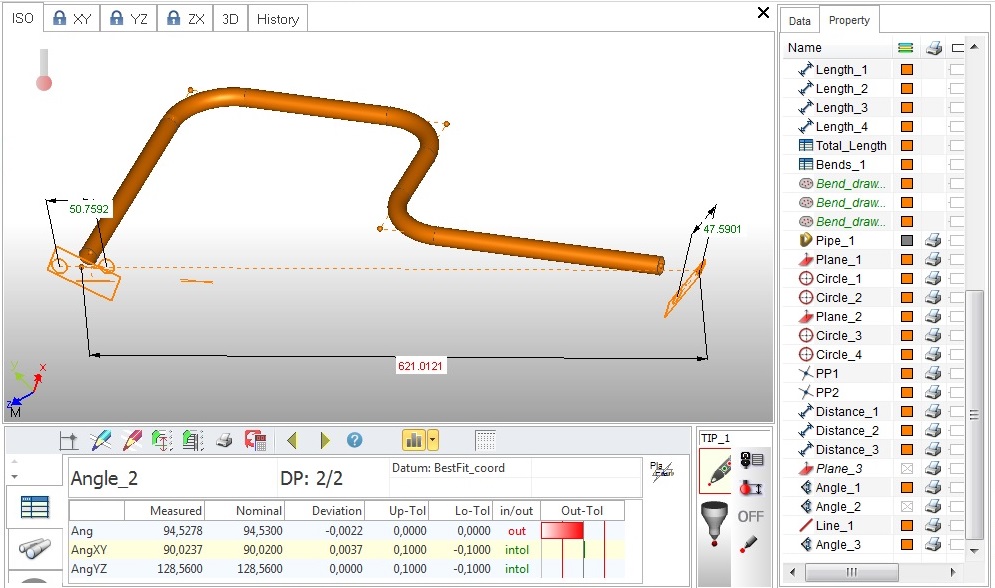
1.系统结构 随动式测量臂实际上是去掉驱动部分的多自由度(通 常采用 6 自由度)关节型机器人,它的各关节处装有关节位置传 感器用于检测关节转角。测量臂由硬件系统与软件系统两部分组成。硬件系统主要包括机器人本体、关节码盘及数据采集电路、末端测头等,软件系统包括通信接口、测点数据计算、基本 CAD 图形构造、特征测量和测量臂标定等模块。工作时,由操作者牵引其末端运动,将末端测头接触到被测 设备物体,实时测得各关节转角。根据机器人运动学原理,用所测得关节转角和测量臂的结构参数,计算出机械臂末端触点在测量坐标系中的空间位置(即三维坐标)。在获得一系列触点的空间坐标后,可以进行后期的反求设计或加工质量校验。
了解更多 >
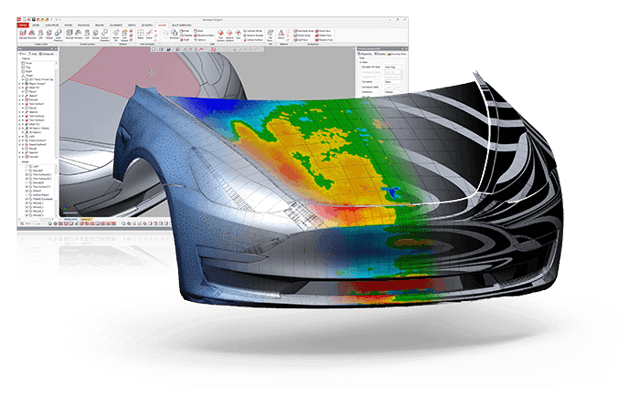
坐标测量技术是 CAD/CAM中一项不可替代的技术,首先, 测量设备是数字化设计的源头,正是通过测量设备把物理的设 计模型或样件转化为计算机中的三维坐标信息,在此基础上才 能开展 CAD/CAE/CAM。其次,在数字化制造中,正是通过测量设备把实际的加工结果重新扫描测量到计算机中,并与设计模型进行比较,寻找误差及其原因,这一功能在复杂模具的制造中尤其重要,在大批量生产的质量检测中也能够发挥重大作用。
了解更多 >